




















































走进星网宇达
公司是工信部专精特新“小巨人”企业,建设有北京市企业技术中心、惯性/北斗多传感器融合导航与测控技术北京市工程实验室。公司共获得国家科学技术进步奖、北京市科学技术奖、吴文俊人工智能科学技术奖、卫星导航定位科技进步奖等国家级、省部级科技类奖项10余项。
了解详情
40000㎡
产业化基地
10项
省部级以上科技类奖项
20项
科技创新项目






股票代码:002829
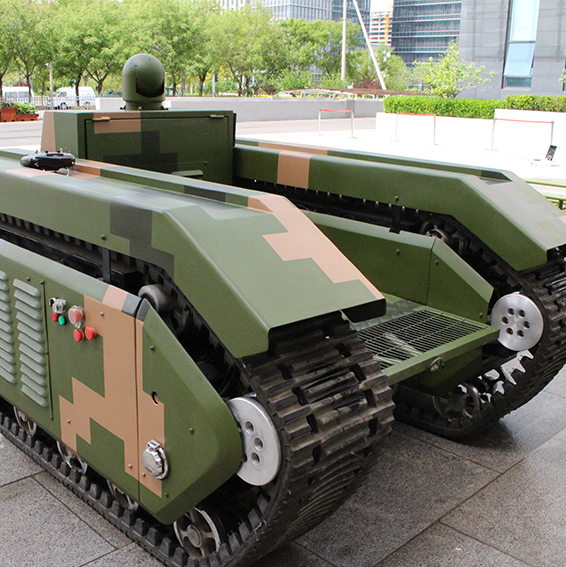
北京星网宇达科技股份有限公司成立于2005年,注册资金20780.9394万元,2016年在深交所上市, 股票代码002829,是以惯性技术为核心,专业从事智能无人系统及核心部组件研发、生产、销售的国家高新技术企业。
版权所有 © 北京星网宇达科技股份有限公司
京ICP备05067819号-3
京ICP备05067819号-3



