



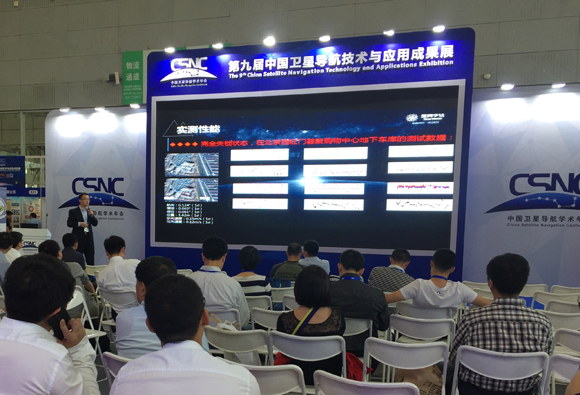
5月24日下午,星网宇达在第九届中国卫星导航学术年会A厅A区举办新技术演讲会,主讲人郭宗本博士结合目前公司在自动驾驶领域的研发开拓,主要介绍了微惯性组合导航技术在自动驾驶中的应用及前景展望。
近两年,自动驾驶技术越来越多的受到相关行业重视,逐渐成为资本和市场关注的焦点,星网宇达顺势而为,积极投身自动驾驶相关设备的研制和配套当中,自主研发了适用于自动驾驶领域的微惯性组合导航系统。
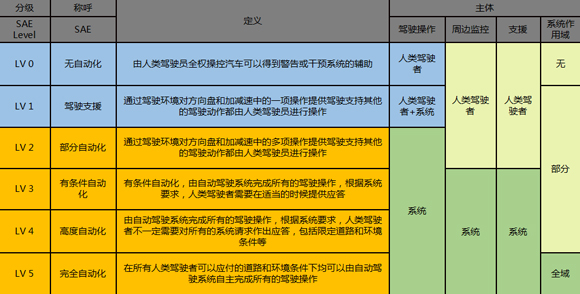
SAE(美国汽车工程师协会)自动驾驶分级定义
微惯性组合导航系统通过将惯性传感器、GNSS传感器、里程计、车辆信息等进行融合,能够在除卫星信号长时间失锁之外的绝大多数场合实现对车辆信息的连续高精度测量,当前和近期的自动驾驶技术对该类组合导航系统存在重大需求。远期来看,L4/L5自动驾驶技术将采用基于多种异质传感器紧耦合的数据融合技术实现车辆全工况高精度定位和环境感知,惯性传感器作为姿态的绝对测量基准和高可靠性的全运动参数传感器,仍然具有其必要性。
公司相关产品已成功应用于自动驾驶领域,车载MEMS惯性组合导航系统在卫星信号良好、存在多路径干扰的城市峡谷、高架路遮挡、地下车库行驶等多种工况下依然表现良好,全程输出平滑,精度稳定。目前,公司一方面在限定区域的工程无人车辆、园区巡逻及通勤无人车、智能公交车、街景及高精度地图采集、有轨车辆的自动驾驶等当前能够落地的应用场景上积累了大量的产品应用案例;另一方面,公司全力配合一些有实力的致力于L3及以上级别自动驾驶解决方案的合作伙伴开发定制化的高性能MEMS组合导航产品,抢占市场先机。







